One of my favorite books is “I do like CFD” by Katate Masatuka. Alongside the technical discussion of various CFD methods, he writes why he likes the method (or doesn’t).
Well, “I do like Gaussian Plume models” – they were the first type of fluid models that I programmed myself. It was fun to investigate things such as the stability of the Atmospheric Boundary Layer, and discover how that could affect ground-level concentrations.
But I would never use one for Risk-Based Gas Mapping.
Here’s why:
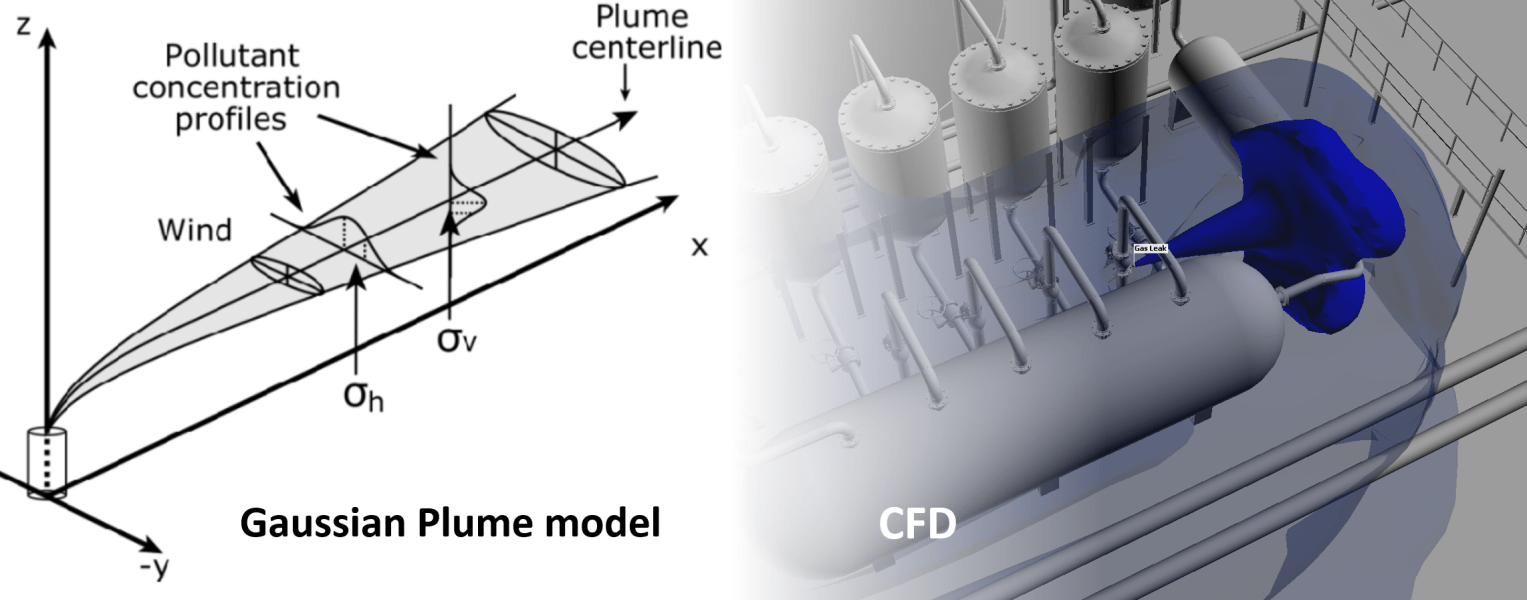
Gaussian Plume models rely on an established plume that conforms to a normal distribution. This almost never happens in practice for gas leaks in congested or semi-congested environments.
Gaussian Plume models cannot account for leaks that oppose the wind direction. This is a common scenario.
Gaussian Plume models rely on a wind condition that conforms to a simple profile. In practice, local wind conditions are complicated, and greatly affected by buildings and equipment.
The applicability of Gaussian Plume models is far too limited to be of practical use for Risk-Based Gas Mapping. Unless there is no congestion (no buildings, no equipment), and we can guarantee that the leaks will never oppose the wind, then Gaussian Plume models are off the table.
This is why CFD is the only technology for Risk-Based Gas Mapping.
Find us